ardupilot-mcp — Uçuş Logu Teşhis Aracı
ArduPilot uçuş kontrolcüsünün ".bin" kara kutu logunu okuyup dronun neden düştüğünü ya da kötü uçtuğunu düz dille açıklayan açık kaynak bir MCP sunucusu; kararları deterministik bir kontrol motoruna dayanır, tahmin yürütmez.
Genel Bakış
ardupilot-mcp, kendi penceresi olmayan bir MCP (Model Context Protocol) sunucusu — Claude Desktop, Cursor, VS Code gibi bir yapay zekâ istemcisine eklenir. Sonra dronun ".bin" uçuş logunu göstererek düz dille "neden düştü?" diye sorabilirsin; yapay zekâ, deterministik bir kontrol motorunun bulgularını senin diline çevirip anlatır.
Çözülen Problem
Bir ArduPilot logu genelde 100 binin üzerinde satır içerir; kaza sonrası titreşim, EKF, batarya ve attitude eğrilerini tek tek okumak zaman alır ve deneyim ister. Mevcut araçlar (Mission Planner Auto Analysis, UAV Log Viewer) veriyi gösterir ama yorumu kullanıcıya bırakır — hiçbiri "neden böyle oldu?" sorusuna gerekçeli, takip sorularına açık bir cevap vermez.
Deterministik Kontrol Motoru
16 kontrol; uçuş dinamiği (titreşim, EKF, GPS, güç, attitude, RC kaybı) ve kurulum/konfig hataları (kablo, kalibrasyon, hatalı parametre, güç marjı/itki-ağırlık oranı) olmak üzere iki ana grupta. Kararı veren yapay zekâ değil, kaynaklı eşiklere sahip sabit bir motor — yapay zekânın rolü yalnızca sonucu anlatmak ve her bulguyu resmi ArduPilot dokümanına bağlamak.
MCP Entegrasyonu, Offline ve Salt-Okunur
Herhangi bir MCP istemcisiyle (Claude, Cursor, VS Code, LM Studio…) ve herhangi bir modelle — yerel açık kaynak modeller dâhil — çalışır. Log dosyası hiçbir zaman makineden çıkmaz; sunucu tamamen offline ve salt-okunur çalışır, ağ erişimi veya araç kumandası içermez. PyPI'de "pip install ardupilot-mcp" ile ve resmi MCP Registry'de yayında.
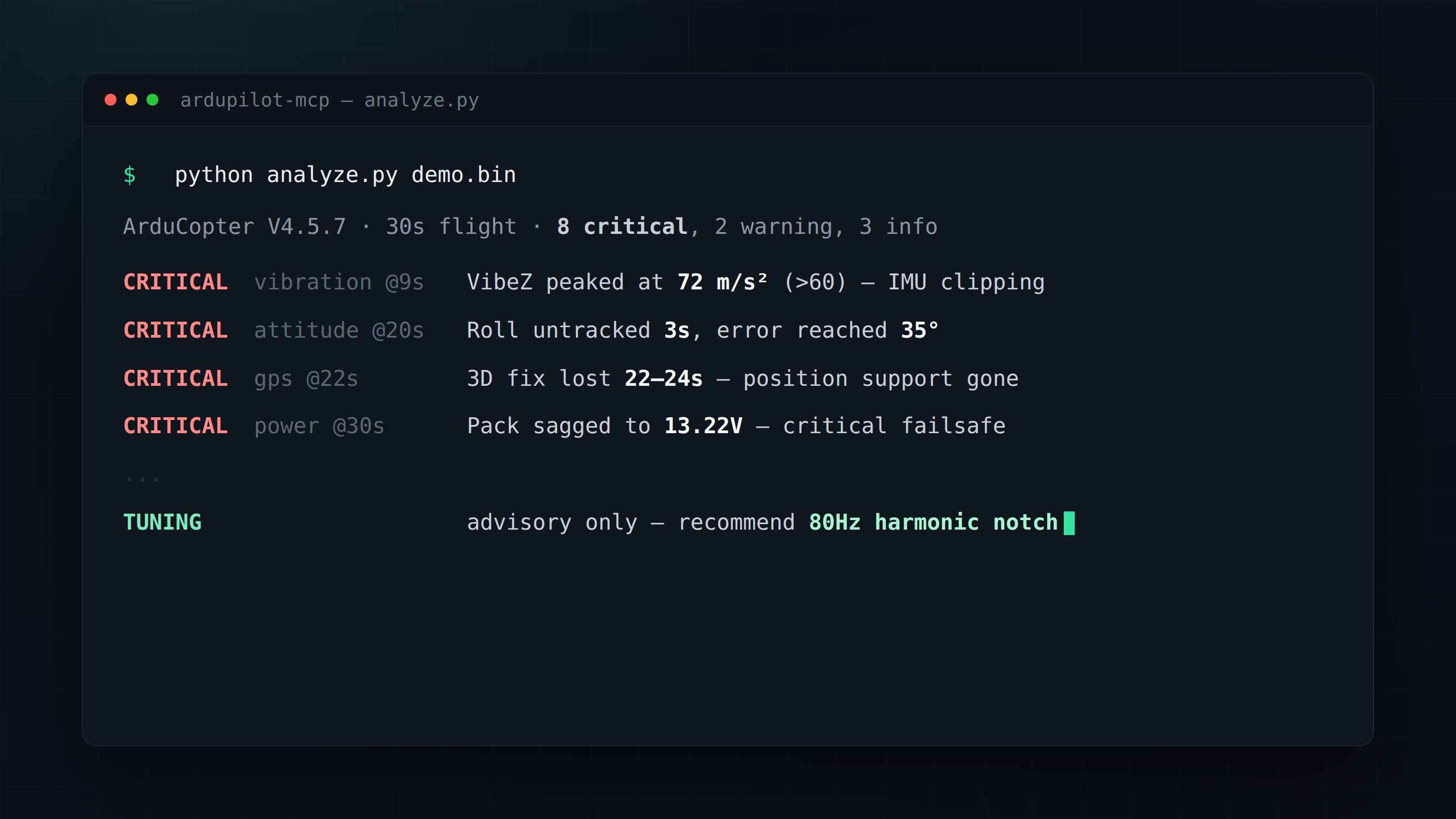
Çıktılar & Sonuçlar
Copter, Heli, Plane, QuadPlane ve Rover'ı kapsayan (Copter 3.2–4.6) 40 gerçek forum kaza loguyla doğrulandı; araç-tipine duyarlı (bir multirotor kontrolü heli'nin swashplate servolarında çalışmaz). MIT lisanslı, tamamen açık kaynak; test paketi ve dokümantasyonla birlikte geliyor.
Teşhis Akışı (log → motor → açıklama)
.bin Logu
Uçuş kontrolcüsünün kara kutusu
Deterministik Motor
16 kontrol, kaynaklı eşikler
AI İstemcisi
Claude / Cursor / VS Code üzerinden sohbet
Bulgu + Doküman
Her bulgu resmi ArduPilot linkiyle
Kullanılan Teknolojiler
Benzer bir çözüme mi ihtiyacınız var?
Bu projeye benzer ya da aynı alanda özel bir çözümü uçtan uca birlikte hayata geçirebiliriz.
Aynısını sizin için kurarım
Asistana yazın; bu projenin benzerini yapıp yapamayacağımı, yaklaşımı ve kaba bütçeyi dakikalar içinde konuşalım, sizi randevuya bağlasın.